Jak můžete změnit směr otáčení stejnosměrného motoru?
Chcete-li změnit směr otáčení stejnosměrného motoru, musíte změnit směr točivého momentu M = cmF/i. To lze provést změnou směru proudu ve vinutí kotvy nebo směru magnetického toku v budícím vinutí.
Jak změnit směr otáčení rotoru stejnosměrného motoru?
Pro změnu směru otáčení stačí změnit polaritu pouze v budicím vinutí nebo pouze na kartáčích rotoru. Pro obrácení vysoce výkonných motorů by měla být změněna polarita na kotvě. Přerušení budícího vinutí za chodu motoru může vést k poruše, tzn.
Jak změnit směr otáčení motoru?
Změňte směr otáčení jednofázového asynchronního motoru v opačném směru – proti směru hodinových ručiček. K tomu stačí znovu připojit jedno z vinutí jednofázového asynchronního motoru – buď pracovní nebo spouštěcí.
Jak můžete změnit směr otáčení pohyblivé části elektromotoru?
Změňte směr otáčení pohyblivé části elektromotoru změnou směru proudu v obvodu. Pohyblivá část elektromotoru se nazývá kotva. Elektromagnet, který vytváří magnetické pole, ve kterém se kotva otáčí, se nazývá induktor.
Jak určit polaritu stejnosměrného motoru?
Budicím vinutím prochází stejnosměrný proud určité polarity, ke kotvě se připojí voltmetr a kotva se rukou nebo pomocí mechanismu uvede do rotace. Ručička voltmetru se vychýlí. Směr vychýlení šipky bude indikovat polaritu kartáčů.
Jak se změní směr otáčení kotvy, když se změní směr proudu v obvodu?
Chcete-li změnit směr otáčení stejnosměrného motoru, musíte změnit směr točivého momentu M = cmF/i. . Při současné změně směru proudu kotvy a magnetického toku v budicím vinutí se směr otáčení nemění.
Jak změnit směr otáčení rotoru střídavého asynchronního elektromotoru?
Směr otáčení rotoru asynchronních motorů závisí na směru otáčení magnetického pole statoru. Pro změnu směru otáčení magnetického pole statoru je třeba prohodit místa dvou libovolných lineárních vodičů vhodných pro vinutí statoru motoru.
Jak přimět motor točit opačným směrem?
Změňte směr otáčení jednofázového asynchronního motoru v opačném směru – proti směru hodinových ručiček. K tomu stačí znovu připojit jedno z vinutí jednofázového asynchronního motoru – buď pracovní nebo spouštěcí.
Jak změnit směr otáčení magnetického pole?
Pro změnu směru otáčení magnetického pole stačí změnit pořadí fází napájecího proudu nebo jednoduše prohodit libovolné dvě fáze zdroje mezi sebou.
Jak určit směr otáčení motoru?
Jak určit směr otáčení motoru
To znamená, že když se podíváte na zadní část motoru, tedy na oběžné kolo, bude se otáčet ve směru hodinových ručiček. Pokud ze strany hřídele – proti směru hodinových ručiček. Bude to pravé nebo přímé otáčení rotoru motoru.
Co se stane s elektromotorem, když se změní směr proudu?
Při současné změně směru proudu kotvy a magnetického toku v budicím vinutí se směr otáčení nemění.
Co se stane s elektromotorem, když se změní směr proudu?
Při změně polarity napětí U se mění směr proudu I kotvy motoru i proudu budícího vinutí, což vede ke změně směru toku Ф vytvářeného budícím vinutím LM. Znaménko elektromagnetického momentu zůstává stejné.
Jak můžete změnit směr otáčení kotvy v elektromotoru?
Pro změnu směru otáčení kotvy sériově vinutého stejnosměrného motoru je nutné změnit směr proudu v budicích vinutích nebo vinutí kotvy.
Jak se určuje směr otáčení kotvy stejnosměrného motoru?
Pomalým otáčením kotvy motoru v požadovaném směru (ve směru nebo proti směru hodinových ručiček) si všimněte největšího vychýlení jehly přístroje. . Směr otáčení motoru bude odpovídat směru otáčení během experimentu.
Jak změnit polaritu DC?
Chcete-li změnit směr otáčení stejnosměrného motoru, musíte změnit směr točivého momentu M = cmF/i. To lze provést změnou směru proudu ve vinutí kotvy nebo směru magnetického toku v budícím vinutí.
Jak změnit polaritu stejnosměrného proudu?
Pro změnu směru otáčení stačí změnit polaritu pouze v budicím vinutí nebo pouze na kartáčích rotoru. Pro obrácení vysoce výkonných motorů by měla být změněna polarita na kotvě. Přerušení budícího vinutí za chodu motoru může vést k poruše, protože.
Nejprve se blíže podíváme na konvenční stejnosměrný motor. Každý motor má dvě hlavní části – rotor a stator. U komutátorového motoru je stator pevnou součástí a skládá se z permanentních magnetů (nebo u výkonnějších motorů z elektromagnetů). Rotor (kotva) se otáčí, je kombinován s hřídelí motoru a skládá se z mnoha cívek (nejméně tří). Kolektor (sestava kartáč-kolektor) je zodpovědný za spínání výstupů cívek rotoru. Proud v takovém motoru je přiváděn do cívek rotoru přes kluzné kontakty (nebo kartáče). V jeden okamžik je připojena pouze jedna cívka a ta vytváří rotaci motoru díky procházejícímu proudu.
Z hlediska základních konstrukčních prvků obvodu může být jakýkoli motor reprezentován jako následující ekvivalentní obvod:
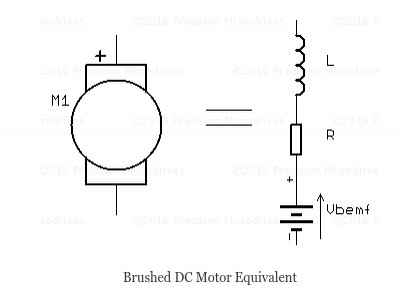
Když je motor připojen ke zdroji stejnosměrného proudu a ještě se nezačal otáčet, představuje normální odpor. To znamená, že jím protéká proud podle Ohmova zákona a odporu jeho vinutí. Indukčnost začíná ovlivňovat, když napětí není konstantní, například pokud je motor napájen signálem PWM.
Odpor rotoru a indukčnost jsou obvykle velmi malé. Lze jej měřit běžným multimetrem. Malé modely motorů mají odpor 1-10 ohmů. Proto, když se motor rozběhne (když se ještě nezačal otáčet), proud vysoce převyšuje provozní proud motoru, a pokud motor stojí dlouhou dobu (je zaseknutý), může tak vysoký proud vést k přehřátí motoru a selhání.
Indukčnost cívek rotoru se snaží udržet konstantní proud procházející vinutím. Jeho účinek je patrný pouze při změně napětí. Když se motor začne otáčet, komutátor začne přepínat cívky rotoru, což způsobí změnu napětí. V těchto okamžicích se indukčnost snaží udržet proud procházející motorem na konstantní úrovni díky napětí.
Jak se cívky rotoru otáčejí, začnou generovat proud (jako generátor) – dochází ke zpětnému EMF. Čím rychleji se rotor otáčí, tím vyšší je zpětné EMF, které se v cívkách vyskytuje, a protože je namířeno proti napájecímu napětí, proud spotřebovaný motorem klesá.
V budoucnu budeme potřebovat následující závěry:
- dokud se motor nezačne otáčet, je to odpor
- Pokud na motor použijete proměnlivé napětí (například PWM), pak bude mít indukčnost velký vliv, bude odolávat změně proudu procházejícího motorem
- při otáčení motoru funguje jako generátor a díky tomu se snižuje spotřeba proudu (konečné napětí je V – Vbemf).
Jak připojit motor k MK
V tomto článku pochopíme, jak ovládat rychlost a směr otáčení běžného stejnosměrného motoru pomocí MK. Aby se stejnosměrný komutátorový motor začal otáčet, stačí na něj přivést určité napětí. Polarita daného napětí určí směr jeho rotace a velikost napětí určí rychlost rotace. Napětí nelze měnit donekonečna. Každý motor je navržen pro určitý rozsah napětí. Jak se napětí zvyšuje, proud přes motor se bude zvyšovat a motor se začne přehřívat a může shořet. Následující graf určitého motoru jasně ukazuje vztah mezi jeho hlavními ukazateli. 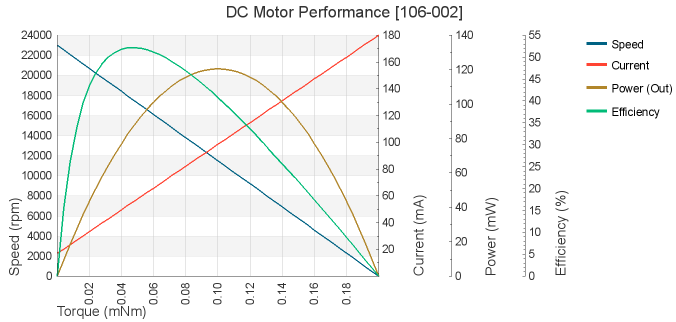
Motor dosahuje maximálního výkonu (točivého momentu) při maximálním proudu. A závislost proudu a točivého momentu je lineární. Motor dosáhne svých maximálních otáček, když není zatížení (při volnoběžných otáčkách, jak se zatížení zvyšuje, rychlost otáčení klesá); Jmenovité provozní napětí je uvedeno v technickém listu motoru a k tomu slouží tento graf. Pokud snížíte napětí, sníží se také rychlost otáčení a všechny ostatní indikátory. Typicky, pod 30-50% jmenovitého napětí se motor přestane otáčet. Pokud motor nemůže otáčet hřídelí (je zaseknutá), stává se v podstatě odporem a odebíraný proud dosahuje maximální hodnoty v závislosti na vnitřním odporu jeho vinutí. Běžný motor není navržen pro provoz v tomto režimu a může se spálit. Podívejme se, jak se mění proud od zátěže na skutečném motoru R380-2580. 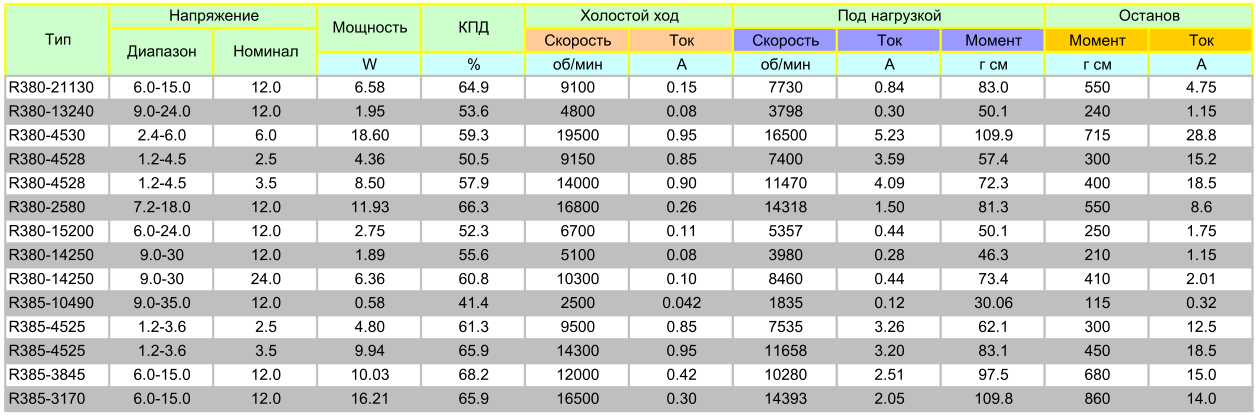
Vidíme, že provozní napětí tohoto motoru je 12V, odběr proudu při zátěži je 1.5A. Zastavovací proud motoru se zvýší na 8A a při volnoběhu je spotřeba proudu pouze 0.8A. Jak víme, port mikrokontroléru nemůže vydávat proud větší než 50 mA a napájecí napětí 12 V je pro něj příliš vysoké. K ovládání motorů potřebujeme elektronický klíč – tranzistor, vezmeme běžný bipolární tranzistor NPN a zapojíme jej následovně špatně systém. 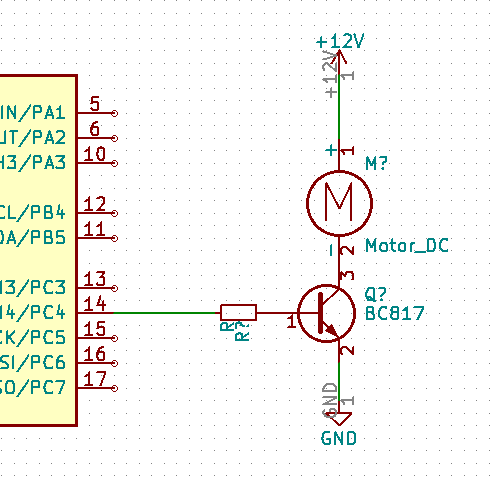
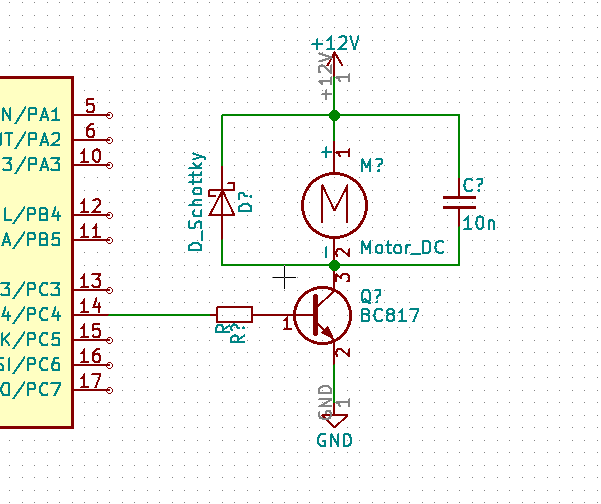
Aby se motorek začal otáčet, musí být do báze tranzistoru přiveden malý proud, poté se tranzistor otevře a dokáže přes sebe propustit mnohem více proudu a napětí – motor se otáčí. Stojí za zmínku, že pokud sestavíme takový obvod, pak tranzistor selže velmi brzy, ne-li okamžitě. Aby se tomu zabránilo, musí být chráněno. Jak již víme, jedna ze součástí motoru – indukčnost – odolává změnám proudu. Když tedy tranzistor zavřeme, abychom motor vypnuli, odpor tranzistoru prudce vzroste a přestane jím procházet proud. Indukčnost tomu ale odolá, a aby proud zůstal na stejné úrovni, začne podle Ohmova zákona prudce stoupat napětí na kolektoru tranzistoru (může dosáhnout i 1000V, i když na velmi krátkou dobu) a tranzistor vyhoří. Aby se tak nestalo, je nutné nainstalovat paralelně k vinutí motoru diodu, která otevře cestu pro zpětné napětí a uzavře ji na vinutí motoru, čímž ochrání tranzistor. Také všechny permanentní motory mají ještě jeden problém – při otáčení není ideální mechanický kontakt v komutátoru, kartáčky při provozu jiskří a vytvářejí rušení, které může vést k poruše mikrokontroléru. Pro snížení tohoto rušení je nutné použít malé kondenzátory zapojené paralelně s přívody motoru (co nejblíže k samotnému motoru). Tady je poslední správně obvod (dioda nemusí být nutně Schottky, ale je preferována).
Bipolární tranzistory se v otevřeném stavu chovají jako diody (úpadne na nich asi 0.7 V). A to zase způsobuje jejich zahřívání při vysokých proudech a snižuje účinnost řídicího obvodu motoru. Proto je lepší řídit motory pomocí tranzistorů s efektem pole (MOSFET). V současné době jsou zcela běžné a mají nízkou cenu. Jejich nízký zapínací odpor jim umožňuje spínat velmi vysoké proudy s minimálními ztrátami. Mají však i své nevýhody. Vzhledem k tomu, že tranzistory MOSFET jsou řízeny napětím, nikoli proudem (a obvykle je to 10 V), musíte buď zvolit speciální logické MOSFETy, které lze ovládat nízkým napětím – 1.8 .. 2.5 V nebo použít speciální napěťové čerpací obvody (tranzistor s efektem pole řidiči). Na to, jak vybrat MOSFET pro váš obvod, se podíváme v dalších článcích, na konkrétních zařízeních. Nyní přiložením logické jedničky na výstup mikrokontroléru uvedeme motor do rotace a logická nula se zastaví. Bude se však otáčet konstantní rychlostí a pouze jedním směrem. Chtěl bych mít možnost měnit směr otáčení motoru a také jeho otáčky. Podívejme se, jak toho lze dosáhnout pomocí mikrokontroléru.
H-Bridge – změna směru otáčení motoru
Pro ovládání směru otáčení motoru existuje speciální obvod zvaný H-můstek (obvod vypadá jako písmeno H). 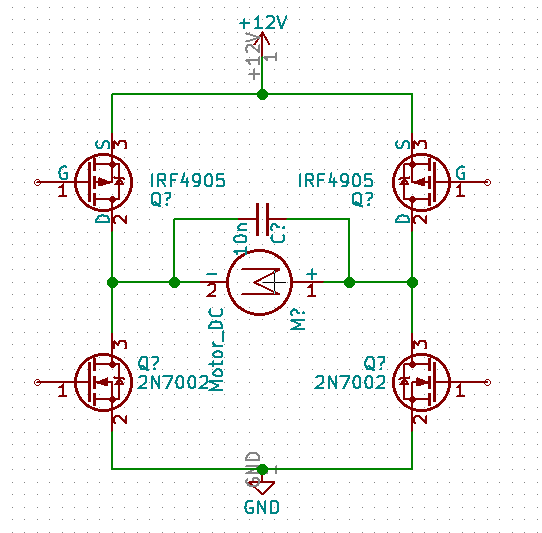
Schéma funguje velmi jednoduše. Pokud otevřete pravý horní a levý dolní tranzistor, pak na svorkách motoru bude plus vpravo a mínus vlevo. Motor se bude otáčet jedním směrem. Pokud otevřete levou horní a pravou dolní část, bude vpravo mínus a vlevo plus – změní se polarita proudu a motor se otočí opačným směrem. Parazitní diody uvnitř tranzistorů MOSFET ochrání celý obvod (parametry těchto diod nejsou příliš dobré a v reálných obvodech budete možná potřebovat rychlejší Schottke diody paralelně s parazitními diodami, aby se snížilo zahřívání tranzistoru s efektem pole), takže nebudou potřeba zbytečné součástky kromě kondenzátoru pro potlačení jisker. 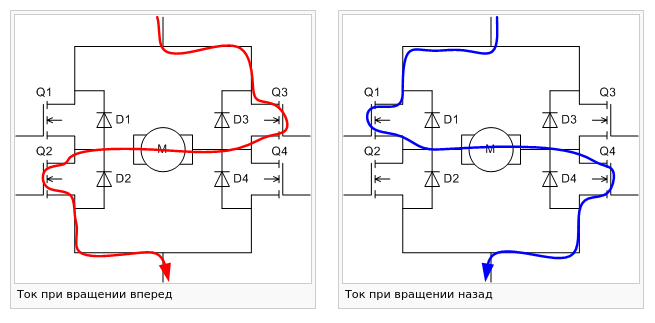
V obvodu H-můstek se jako spodní tranzistory vždy používají N-kanálové, ale horní mohou být N-kanálové nebo P-kanálové. P-kanálové tranzistory v horním spínači jsou snadněji ovladatelné, stačí vytvořit obvod předpětí napěťové úrovně. K tomu můžete použít nízkovýkonový N-kanálový efekt pole nebo bipolární tranzistor. Spodní tranzistor lze ovládat přímo z MK, pokud zvolíte speciální tranzistor s logickým polem. Pokud váš obvod bude používat vysokonapěťový stejnosměrný motor (více než 24V) nebo výkonný motor s proudy většími než 10A, pak je lepší použít speciální mikroobvody – ovladače tranzistorů MOSFET. Budiče jsou řízeny zpravidla signály mikrokontroléru od 2 do 5V a na výstupu vytvářejí napětí potřebné k úplnému otevření tranzistorů MOSFET – obvykle 10-15V. Budiče také poskytují velký pulzní proud nezbytný k urychlení otevírání tranzistorů s efektem pole. Pomocí ovladačů je snadné organizovat ovládání horního N-kanálového tranzistoru. Velmi dobrým ovladačem je čip L6387D od ST. Tento mikroobvod je dobrý, protože nevyžaduje diodu pro napěťový čerpací obvod. Takto je připojen k ovládání H-můstku na 2 N-kanálových tranzistorech. 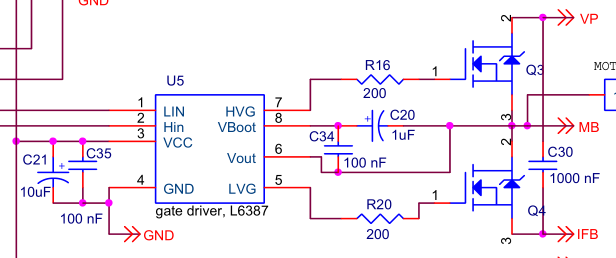
N-kanálové tranzistory s efektem pole jsou levnější než P-kanálové a mají také nižší odpor v zapnutém stavu, což jim umožňuje spínat velké proudy. V horní poloze se ale ovládají hůře. Problém s použitím N-kanálového tranzistoru v horním spínači je ten, že k jeho otevření je potřeba přivést napětí 10V vzhledem ke zdroji, a jak můžete vidět na diagramu, může být veškeré napájecí napětí motoru, a ne 0 voltů. Do základny tedy musí být přivedeno 10V + napájecí napětí motoru. Ke zvýšení napětí potřebujete speciální bootstrap obvod. Obvykle se pro tyto účely používá napěťový čerpací obvod využívající kondenzátor a diodu. Toto schéma však funguje pouze v případě, že neustále dobíjíte kondenzátor – otevíráním a zavíráním spodního tranzistoru (v PWM řízení). Aby bylo možné udržovat horní tranzistor neustále otevřený, je třeba obvod dále zkomplikovat – přidat obvod pro externí napájení kondenzátoru. Zde je příklad obvodu pro buzení N-kanálových tranzistorů bez použití čipů ovladače. 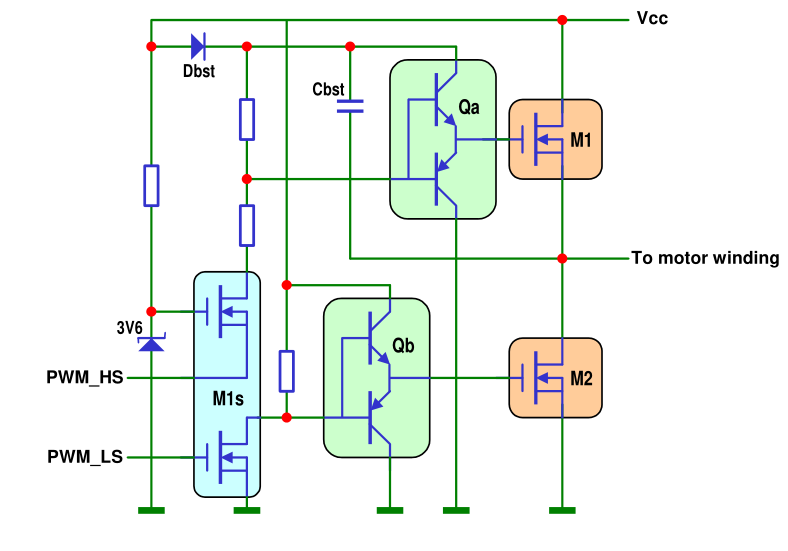
Pojďme k ovládání rychlosti otáčení motoru.
PWM signál – ovládání rychlosti otáčení motoru
Stejnosměrné motory mají lineární závislost rychlosti otáčení na použitém napětí. Aby se snížila rychlost otáčení, musí být aplikováno menší napětí. Musíme si však pamatovat, že s poklesem napětí klesá výkon motoru. Proto je v praxi možné řídit otáčky motoru pouze v rozsahu 30%-50% plných otáček motoru. Pro řízení rychlosti motoru bez ztráty výkonu je nutná zpětná vazba od motoru o rychlosti otáčení, například jako u elektrického šroubováku. Tento režim ovládání vyžaduje složitější obvod. Zvážíme jednoduchou možnost – řízení rychlosti motoru bez zpětné vazby. Musíme tedy změnit napětí dodávané do motoru. Máme k dispozici tranzistor MOSFET. Pamatujeme si, že náš motor má indukčnost. Indukčnost odolává změnám proudu. A pokud rychle zapnete a vypnete napětí na motoru, pak v okamžiku vypnutí bude proud pokračovat v toku kvůli indukčnosti. A motor se bude dále otáčet setrvačností a nezastaví se. Ale přirozeně se bude otáčet pomaleji a průměrné napětí na jeho vinutí bude nižší. Mikrokontrolér je vynikající při generování pulzního PWM (PWM) signálu. A motor je schopen tento signál (průměr) integrovat díky indukčnosti vinutí a setrvačnosti rotoru. Průměrné napětí přijímané motorem, a tedy i rychlost, bude záviset na pracovním cyklu (pracovní faktor) signálu PWM. Jaká frekvence PWM je potřeba pro lepší řízení motoru? Odpověď je velmi jednoduchá, čím více, tím lépe. Minimální frekvence závisí na indukčnosti motoru, hmotnosti rotoru a zatížení hřídele motoru. Pokud nasimulujete PWM řízení motoru v elektrickém simulátoru (například PROTEUS), uvidíte, že čím vyšší je frekvence PWM, tím hladší proud protéká motorem (vlnný proud – klesá s rostoucí frekvencí). Nízká frekvence: 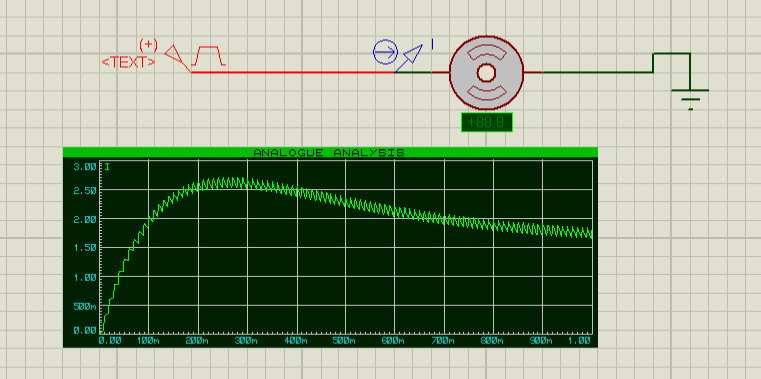
vysoká frekvence: 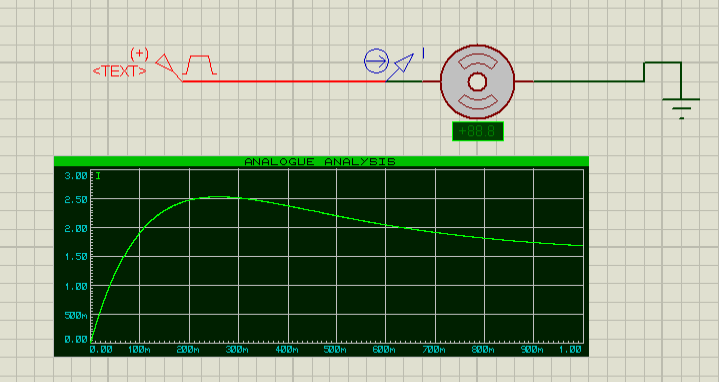
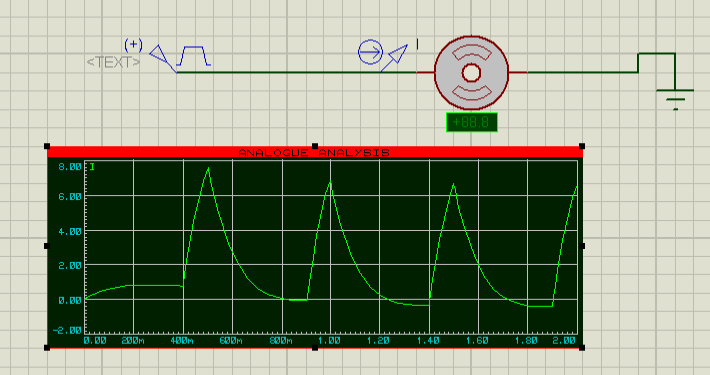
Pokud frekvence klesne pod určitou úroveň, proud se stane nespojitým (klesne na nulu) a v důsledku toho se motor nebude moci otáčet.
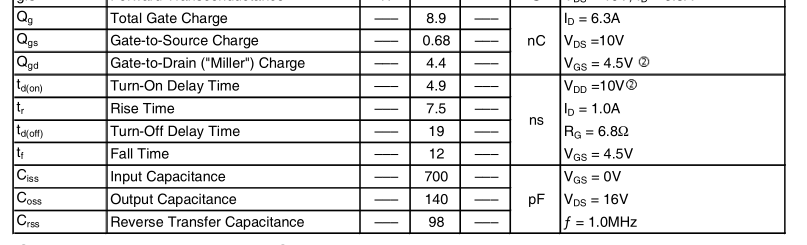
Skvělé, je to jednoduché! Uděláme frekvenci PWM vyšší, třeba 1 MHz a bude to stačit na jakýkoli motor. V životě není všechno tak jednoduché. Abyste pochopili všechny možné problémy, můžete jednoduše vzít bránu tranzistoru MOSFET jako ideální kondenzátor. Aby se tranzistor úplně otevřel, je třeba nabít kondenzátor na 10V (ve skutečnosti méně). Čím více proudu můžeme do kondenzátoru napumpovat, tím rychleji se bude nabíjet, což znamená, že tím rychleji se tranzistor otevře. V procesu otevírání tranzistoru bude proud a napětí na něm maximální a čím delší je tato doba, tím více se tranzistor zahřeje. Datasheet obvykle obsahuje takový parametr jako Qgate – plný náboj, který se musí přenést na tranzistor, aby se úplně otevřel.
- Uzemnění ovládání motoru a mikrokontroléru musí být oddělené, spojení v jednom bodě tenkým vodičem, například 0.3 mm, co nejblíže k napájecím vodičům celého obvodu.
- Řídicí ovladače MOSFET by měly být co nejblíže samotným tranzistorům MOSFET
- Provedení ovládacího prostoru musí být oboustranné, nejlépe s vrstvou zeminy na jedné straně. Při pulzním řízení dochází k elektromagnetickému rušení, aby se snížilo, musí být v blízkosti zemní vrstva.
- Je nezbytně nutné mít kondenzátor co nejblíže k oblasti, kudy procházejí velké pulzní proudy. Pokud takový kondenzátor neexistuje, napětí na elektrickém vedení výrazně poklesne a mikrokontrolér se bude neustále resetovat. Také bez takového kondenzátoru se kvůli indukčnosti silových vodičů může napětí na elektrickém vedení několikrát zvýšit a součásti selžou!
PWM signál v H-můstku
- při otevřeném tranzistoru dochází k zahřívání vlivem odporu v otevřeném stavu Rdson, výkon se uvolňuje úměrně době otevření tranzistoru P = I * I * Rdson
- při sepnutém tranzistoru protéká diodou motorový EMF proud, to znamená, že dochází k zahřívání diodou P = I * U dioda vpřed (obvykle 1V)
- když se tranzistor přepne z otevřeného do uzavřeného stavu, ohřev je úměrný době, kdy se tranzistor otevírá a zavírá